|
||||||||||
| 主页 | 新闻 | 实验室成员 | 研究领域 | 科研成果 | 科研项目 | 加入我们 | ||||
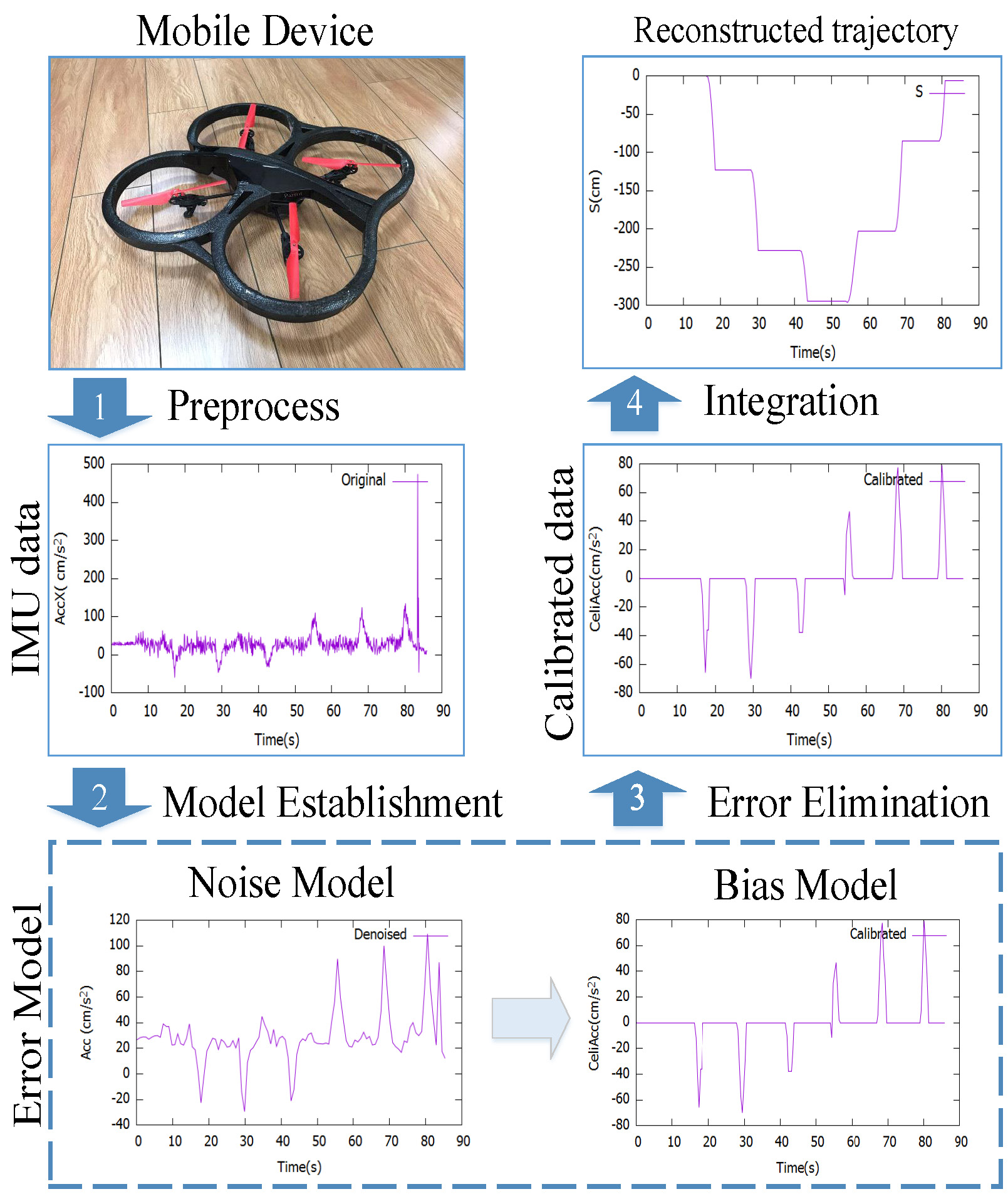
无人机的飞行轨迹自动恢复是另一个重要研究课题。在基于无人机的三维场景重建、虚拟现实浏览、立体视频生成等方面,都需要提供每一时刻下机载相机的位置、姿态等内外参数信息。目前常用的基于视频的轨迹恢复算法在低纹理、低光照环境条件下容易失效,而基于GPS等定位系统的方法在无法获得信号时也会定位失败,因此适用范围有限。 在本课题中,我们充分利用了无人机本身搭载的多种传感器,如加速度计、陀螺仪、磁力计、超声传感器等,提出了一种基于多传感器融合的无人机飞行轨迹自动恢复算法。由于机载的MEMS传感器精度低、测量信号误差大,我们建立了一种误差模型,对传感器测量信号中的噪声误差和偏移误差分别采用不同策略进行消除,获得了更好的结果。其中,对噪声误差利用一个低通滤波器进行滤除;对于偏移误差,则通过多个传感器的数据综合判断运动事件,从而对数据漂移进行校正。利用校正后的加速度计数据进行积分,就可以计算出正确的飞行轨迹。
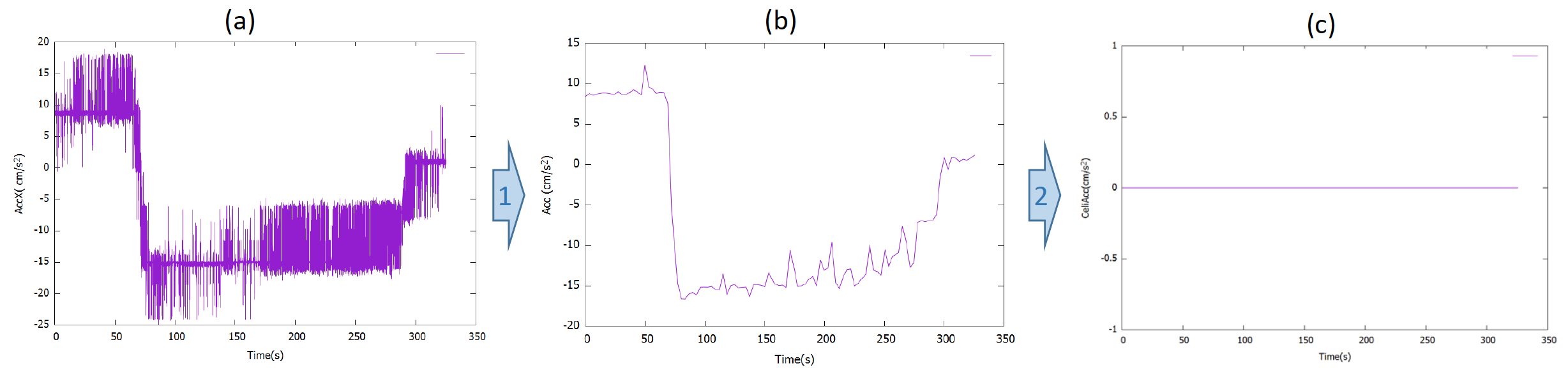
▲ 消除加速度计测量数据中的噪声(高频震荡)和偏移(红线漂移)误差。(a)设备静止时采集的原始测量数据;(b)用低通滤波器滤除噪声后得到相对平滑的数据;(c)采用事件检测方法校正偏移误差后正确恢复出静止时的加速度读数(直线)。(点击放大)
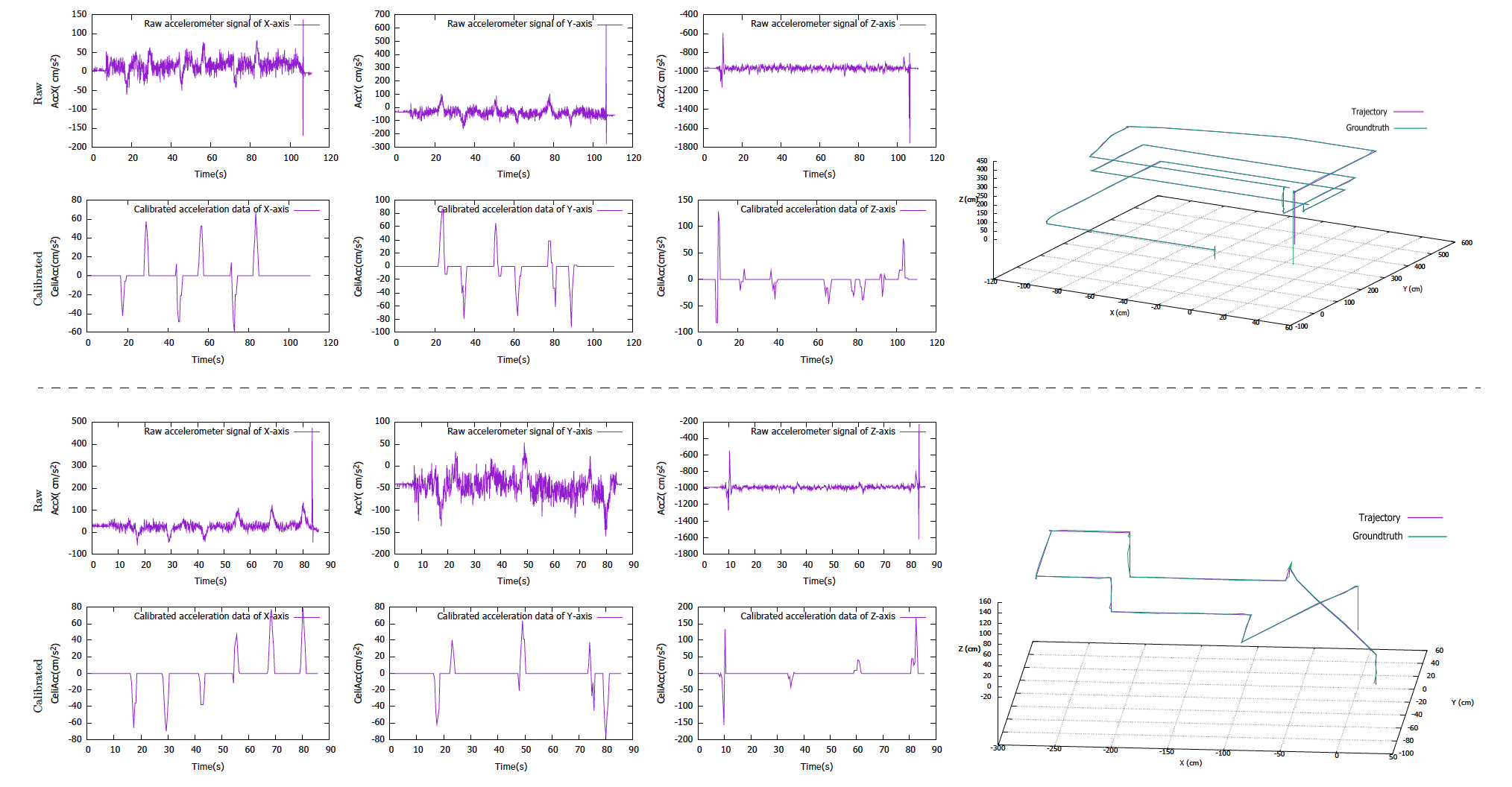
▲ 校正前后三个方向的加速度计数据(左),以及恢复的无人机飞行轨迹(紫色线)与真实飞行路径(绿色线)比较。(点击放大)
相关论文:
| ||||||||||
|
地址:北京市海淀区中关村北大街128号 |
||||||||||